CH-01 ACS5000 Overview (G-01)
Upon Completion of this part the student can describe
- Generally, MV drive Families and different applications.
- The Key technologies like DTC, IGCTs.
- ACS 5000’s 5 level tropology.
- The ACS 5000 Options.
This module will present the ABB Medium Voltage Drive families and applications, focusing on ACS 5000 characteristics and five level topologies. ACS 5000 options will also be discussed.

ACS 5000A
Medium voltage AC Drive. Power range: 315 KW to 72 MW or higher. Motor voltage: 2.1KV to 11 KV
Medium voltage drive AC Converter families:
Drive ACS 1000 (VSI) (315KW -5 MW)
Drive ACS 2000 (VSI)(250KW -1600KW)
Drive ACS 5000 (VSI) (2MW-36MW)
Drive ACS 6000 (VSI) (3 MW -27MW)
LCI (Load Commutated inverter) (2 MW -72 MW or higher)
The ABB Medium Voltage AC Drives are used to control the speed and torque of induction and synchronous machines where high powers are needed. By delivering precise process control through ABB’s patented Direct Torque Control, or DTC technique, our drives ensure the highest control accuracy without the use of an encoder, despite input power variations or sudden load changes. ABB Medium Voltage Drives can be used for induction, synchronous or permanent magnet motors and cover a power range from 315 kW to 72 MW or higher, with motor voltages from 2.1 to 10 kV. ACS 1000, ACS 2000 and ACS 5000 are general purpose products, that means standard drives. ACS 6000 and LCI are special purpose products, which means engineered drives.
General Purpose Drive:
ACS 1000 Drive:
ACS 1000 is a Voltage Source Inverter, air or water cooled, with a 12-pulse or 24 pulse diode rectifier as front end. It is equipped with Integrated Gate Commutated Thyristors, or IGCT’s, in a 3-level switching configuration. The power range is from 315 kW to 5 MW, for the motor voltages 2.3, 3.3, 4.0 and 4.16 kV.

ACS 2000 Drive:
ACS 2000 is an IGBT drive, air cooled, with Active Front End. The medium voltage IGBT’s are arranged in a 5-level switching topology, with nine levels output. The power range is from 250 to 1600 kW, for motor voltages from 4 to 6.9 kV.

ACS 5000 Drive:
Two cooling versions are available for ACS 5000, air and water cooled. Air cooled ACS 5000 covers the power range from 2 to 7 MW, with 6 to 6.9 kV output. For the higher power range, the water-cooled ACS 5000 will be used, it covers a power range from 5 to 36 MW. ACS 5000 is an IGCT drive with a 36 pulsed diode rectifier as a front end. The inverter is a 5-level switching topology, which produces a nine-level voltage output to the motor. It can control induction, synchronous or permanent magnet motors, whereas ACS 1000 and ACS 2000 can only be used for induction motors.

Special Purpose Drive:
ACS 6000 Drive:
ACS 6000 is a Voltage Source Inverter, 3-level switching topology, IGCT drive. The power range is from 3 to 27 MW at 3 to 3.3 kV. The front end can be either an active rectifier for four quadrant operation, or a diode rectifier for two quadrant operation. Several inverters can be connected on the same DC bus in a multi drive configuration. ACS 6000 is a water-cooled drive, which can control induction, synchronous or permanent magnet motors.

LCI -Mega Drive:
MegaDrive LCI is a thyristor drive, air or water cooled. It is a Load Commutated Inverter, only for synchronous motors and always four quadrant operation. The standard power range is from 2 to 72 MW for motor voltages from 2.1 to 10 kV.

Application:
ABB Medium Voltage Drives are used in a wide range of industries and applications, such as cement, mining and minerals, chemical, oil and gas, marine, metals, power plants, pulp and paper, water stations and other special applications. The load could be blowers, fans, conveyors, compressors, extruders, mixers, pumps, refiners, gas and hydro turbine starters, soft starters for large machines, test stands, wind tunnels and so on.

Direct Torque Control:
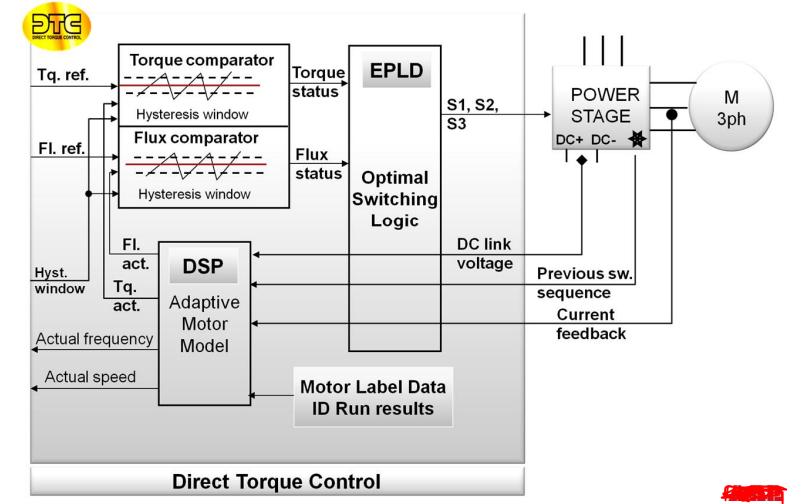
Direct Torque Control is a unique motor control method for AC drives developed by ABB, based on the field-oriented control theory and the direct self-control concept developed in the 1980’s. With Direct Torque Control, the field orientation and torque control are achieved without speed feedback, using an adaptive motor model and the current feedback, DC bus voltages and previous switching combination as input variables. Based on these data, a fast Digital Signal Processor DSP calculates every 25 µs the actual values of the fundamental motor variables, magnetizing flux and motor torque. Torque and flux comparators compare the actual values with the reference values produced by the torque and flux reference controllers. The outputs of the torque and flux hysteresis comparators are the Torque Status and Flux Status. For instance: if the actual flux is within the hysteresis window, the output Flux Status is 0. Whenever the flux drops below the hysteresis limit, the Flux Status goes high: +1, and whenever the actual flux rises above the hysteresis limit, the Flux Status goes low: -1. Based on the Torque and Flux Status, the next switching combination is picked up from an Optimal Switching table implemented in the Electronic Programmable Logic Device, an electronic circuit of one of the drive control boards. Switching is done when necessary; no modulator is involved, no switching pattern, no speed feedback required.
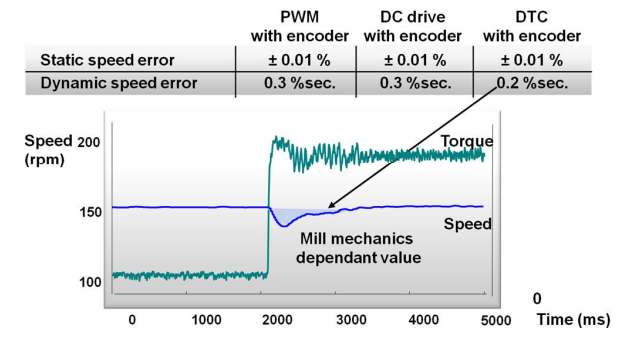
Dynamic Speed Accuracy:
The modulator is not used anymore in DTC control, there is no switching pattern as in PWM. Based on the measured values of motor currents and DC voltage, on the calculated values of actual flux and torque and
on the previous switching sequence, the software chooses the next optimal switching sequence in order to achieve the flux and torque requirements. The torque response of a drive with DTC is typically 10 times faster than any AC or DC drive. The dynamic speed accuracy of DTC drives will be 8 times better than any open loop AC drives and comparable to a DC drive with encoder.
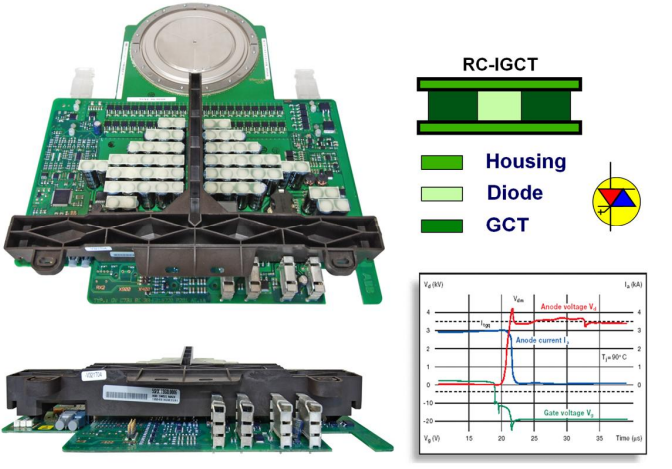
IGCT (Integrated Gate Commutated Thyristor):
The IGCT was specially developed for medium voltage industrial applications. ACS 5000 uses Reverse Conducting IGCT’s where the power semiconductor includes a reverse conducting diode in anti-parallel with the thyristor. The semiconductor wafer is a GCT, or Gate Commutated Thyristor. Like a GTO, or Gate Turn Off thyristor, it is a fully controllable switch: The GCT can be turned ON or OFF by gate signals. But, due to its technology, it is much faster and more efficient than a GTO: the losses are 40% lower than in the case of a GTO. The gate driver, with a special electrical and mechanical design, is integrated into the same single unit with the semiconductor, in order to reduce the circuit inductance. The interface with the external circuit is reduced to a DC power supply connector and a fiber optic receiver for ON / OFF control. A light signal on the fiber optic receiver will turn the IGCT ON; cutting OFF the light at the receiver will turn OFF the IGCT. In both ways, the switching sequence only a few microseconds. Practically, the IGCT combines the speed of an IGBT with the robustness and reliability of a thyristor. It has a high turn-off rating, so no snubber circuit is necessary in applications without series IGCT’s. And please remember the entire control interface is reduced to a DC power supply connector and a fiber optic cable, resulting also in a high reliability and high electromagnetic immunity.
The principle to Achieve 6.9 KV:
With the existing well-established IGCT 3-level platform, the maximum output voltage is 4.16 kV. The ACS 5000 reuses this platform, and the converter phases are put in a star connection instead of a delta connection through 5-level topology. A characteristic of this topology is, that the DC links are floating.

ACS 5000 System Tropology:
The ACS 5000 consists of three identical power cells. Each power cell supplies one of the motor phases and represents the equivalent of a single-phase inverter with a 12-pulse diode rectifier as front end. On each phase, two 6-pulse rectifiers are connected in series which means the current value through these two diode bridges will be the same, but the DC voltage value will be double. To minimize the harmonics, each power cell is supplied by two three phase AC inputs with 30 degrees phase shift. The overall phase shift between the six inputs is 10 degrees. An H-bridge inverter configuration is used on the motor side, which means that two 3-level inverter cells in parallel are used. One for the AC output to the motor and the other for the common rail connection. Each 3-level inverter cell consists mainly of four reverse conducting Integrated Gate Commutated Thyristors and two Neutral Point diodes.
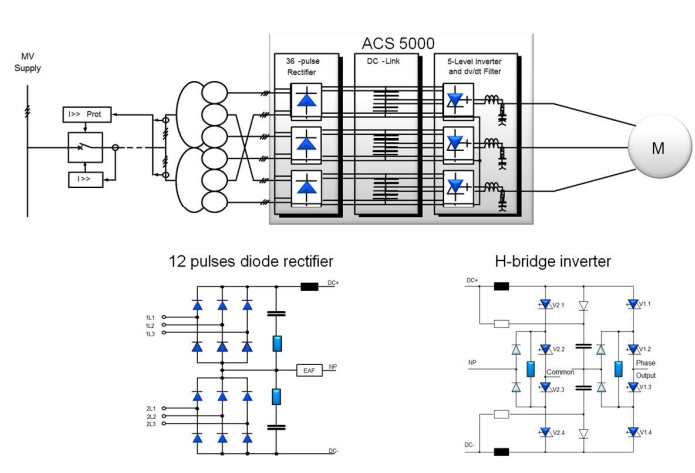
5 level Inverter Cell:
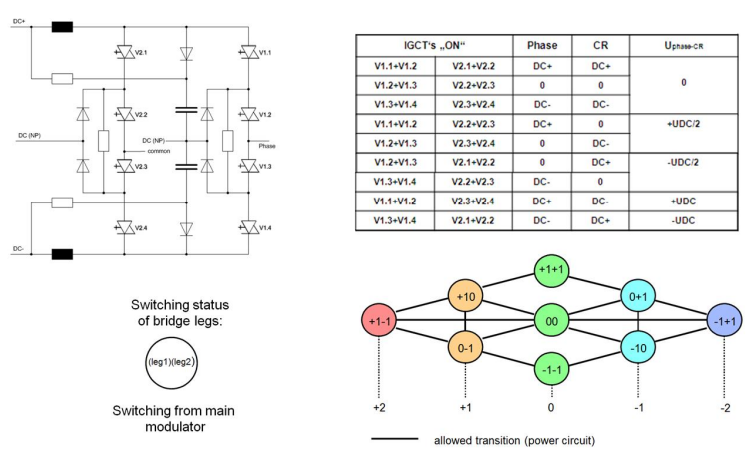
Let’s check how the ACS 5000 can achieve 5 different levels. As you can see from one 5-level cell, the output of leg 1 is connected to the motor terminal. The output of leg 2 is connected to the common rail. Let’s say that +1 means the upper two IGCT’s are switched on, 0 means the middle two IGCT’s are switched on, and -1 means the lower two IGCT’s are switched on. If leg 1 and leg 2 are both connected to DC plus, then the voltage between the phase output and the common rail is zero. There two other possibilities to achieve zero volts between phase output and common rail. If both legs are connected to neutral or both legs are connected to DC minus. If leg 1 is connected to DC plus and leg 2 is connected to neutral, then the voltage between phase output and the common rail is half DC link voltage. If leg 1 is connected to neutral and leg 2 is connected to DC minus, you will get the same result. If leg 1 is connected to neutral and leg 2 is connected to DC plus, then the voltage between phase output and the common rail is minus half DC link voltage. Also here, there is another switching combination giving the same result; if leg 1 is connected to DC minus and leg 2 is connected to neutral. If leg 1 is connected to DC plus and leg 2 is connected to DC minus, then the voltage between the phase output and the common rail is full DC link voltage. Conversely, if leg 1 is connected to DC minus and leg 2 is connected to DC plus, the voltage is minus full DC link. Totally you can get 5 different levels with 9 different switching combinations per inverter cell.
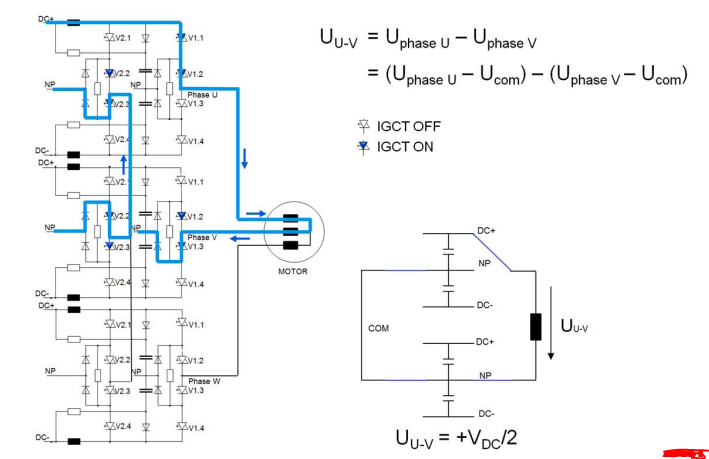
Phase to Phase Voltage Level:
The next question is how many levels the ACS 5000 can produce between two different phases. Let’s start
from the beginning again. As you can see in the ACS 5000 inverter diagram, the inverter cells can be
connected together through the common rail. The formula we use for the phase U to phase V voltage
calculation is also shown in the slide. The blue color on the IGCT’s means that they are switched on. So with different switching combinations, the motor terminals could be connected to DC plus, Neutral Point or DC minus. Also, the common rail connection in each inverter cell can be connected to the same three potentials.
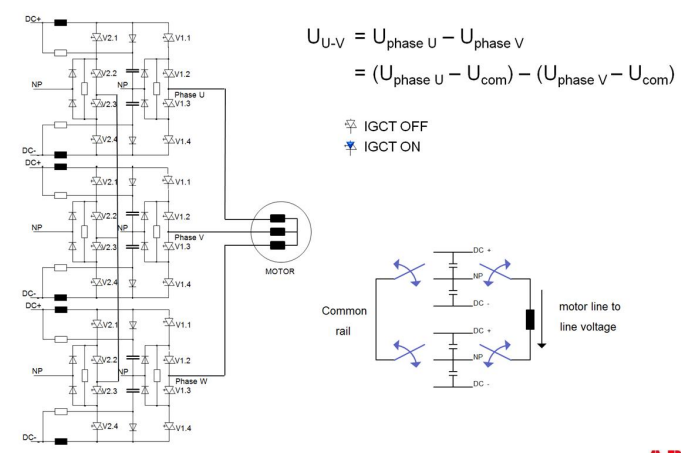
Phase to Phase 0 voltage Output:
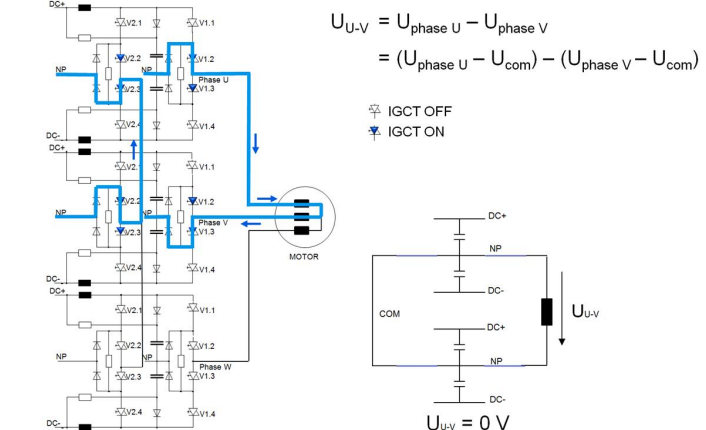
In the first example, in phase U leg 1 and leg 2 are both connected to neutral, and also in phase V leg 1 and leg 2 are connected to neutral. Then, the voltage between phase U and phase V is 0. Because of the same potential, the current flow direction will be defined by the previous status. In this case, we assume that the current is flowing from phase U to phase V.
Phase to Phase Half DC link Output:
In the next step, phase U leg 1 is connected to DC plus and leg 2 is connected to neutral. In phase V leg 1
and leg 2 both are connected to neutral. Then, the voltage between phase U and phase V is half DC link.
Phase U has a higher voltage potential compared with phase V, so the current will keep the flow direction
from phase U to phase V.
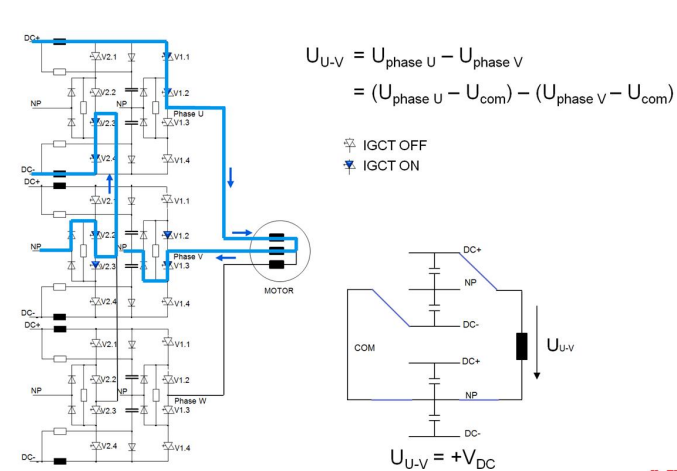
Phase to Phase DC Link Output:
Now, phase U leg 1 stays at DC plus and leg 2 changes to minus. In phase V both legs are still connected to neutral as before. The voltage between phase U and V is now full DC link voltage. Phase U has a higher
voltage potential compared with phase V, so the current will keep the flow direction from phase U to phase V.
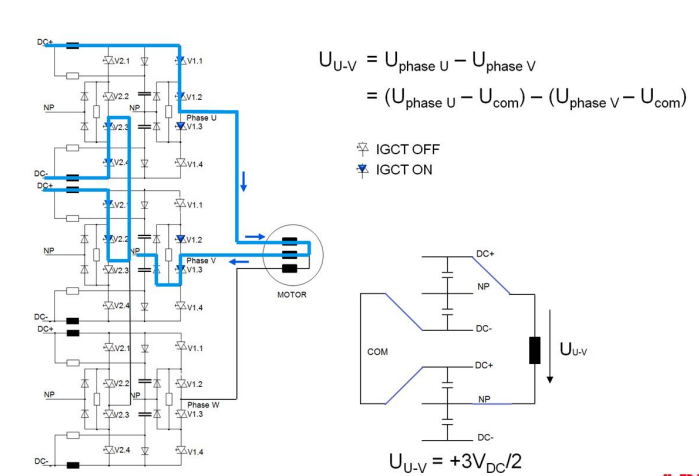
Phase to Phase One and a half DC Link Output:
In the next step, phase U remains the same: leg 1 is connected to DC plus and leg 2 is connected to minus. In phase V, leg 1 is still connected to neutral but leg 2 is changed to DC plus. Then, the voltage between phase U and V is one and a half DC link voltage. The current direction will not change, and its value will increase.
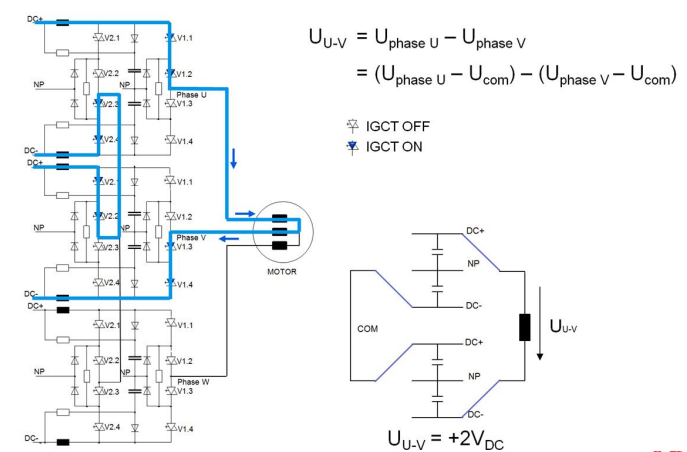
Phase to Phase two DC Link Output:
Now, phase U leg 1 is connected to DC plus and leg 2 is connected to minus. On phase V, leg 1 is connected to DC minus and leg 2 is connected to DC plus. This will result in the maximum output voltage of double DC link between phase U and phase V.
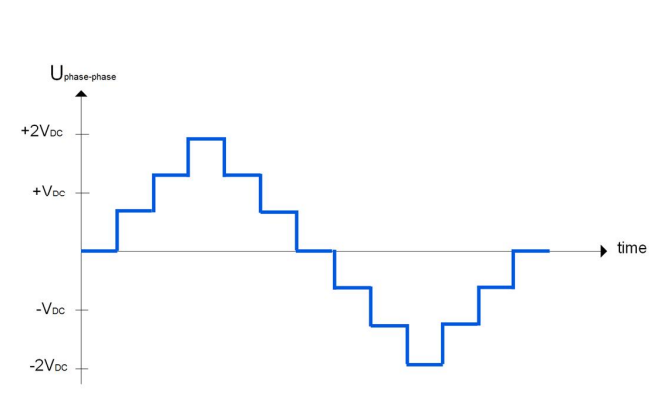
Phase to Phase 9 Voltage Levels:
It can be seen that there are four positive voltage levels, four negative voltage levels and the zero voltage
level. The total number of voltage levels is nine. Actually, in order to get a sinusoidal voltage to the motor, then number of switching levels would have to approach infinity. However, too many switching levels decrease reliability and efficiency because the number of components increases. The ACS 5000 topology provides the optimum solution because it has enough switched levels to enable the use of standard motors while at the same time keeping the parts count to a minimum.
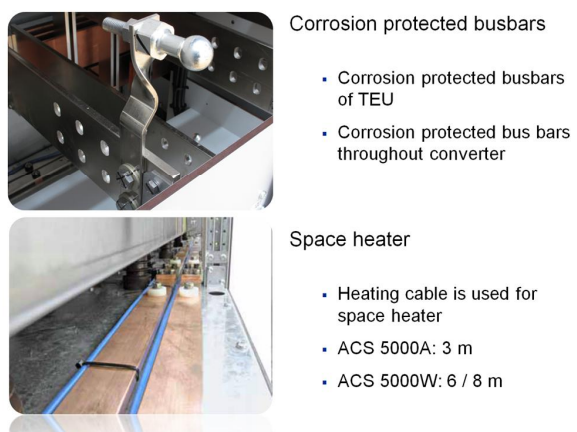
ACS 5000 Optional- Environmental Condition:
Now, let’s have a look at the available options. Taking into account that the ACS 5000 may be applied to some particular environment, corrosion protected bus bars can be chosen. For example, this could be necessary in case of salty air in combination with increased ambient temperature and high humidity. The space heater is another possible choice for high humidity environments. The voltage level needs to be specified in the order form
Converter Frame:
There are also several options for the converter frame. The customer can choose between different protection classes, different cabinet painting colors and different power cable entries. According to the EMC requirements, customer could even choose different cable entry frames.
Protection Class: ACS 5000 A =IP 21, ACS 5000W=IP32
Power Cable Entry: Top and bottom entry, EMC type entry plate, Roxtec Frames, Al blank plates.
Converter Cooling:
The cooling fan feeds the cooling air to the main power components and transfers the heat outside the drive. Depending on the cooling capacity demands, a standard air-cooled ACS 5000 will be equipped with 1 or 2 cooling fans on the roof. If redundant fans are selected, the continuous operation of the drive is guaranteed in case a standard fan failure occurs. Switchover from the faulty to the standby device takes place automatically. In the water-cooled ACS 5000, a standard two-way valve will be used for the raw water control. If the raw water loop is not allowed to be fully closed, a 3-way valve could be used. For leakage monitoring, leakage sensor is an option.

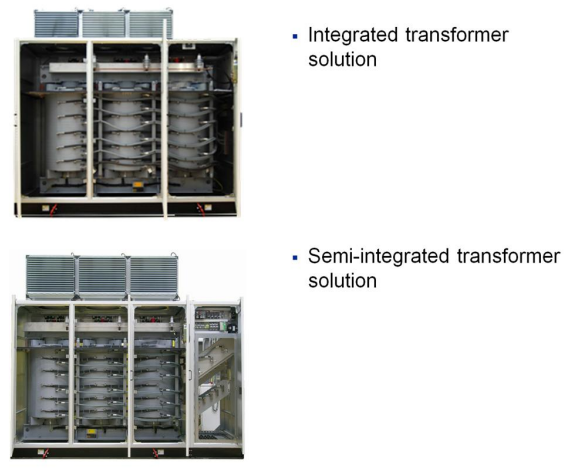
Integrated Transformer:
ABB provides an air cooled integrated transformer option for the air cooled ACS 5000. According to the real installation space, the customer could choose between the integrated or the semi-integrated transformer version. The integrated transformer will be located at the same place as the ACS 5000 converter. The semi integrated transformer can be installed in a different electrical room.
Transformer Protection Relay:
Of course, the customer can also use an external transformer. In that case, the customer is also responsible for the transformer protection. The protection relay Digi trip 3000 is an option to protect the transformer. It will offer overcurrent and short-circuit protection for the external transformer.
The relay offers 3 types of protection:
- Time overcurrent protection: It detects overcurrent due to overload or faults.
- Short Delay: A short time protection that is responsive to short circuit current.
- Instantaneous: The quickest time of protection respond to high short circuit current.
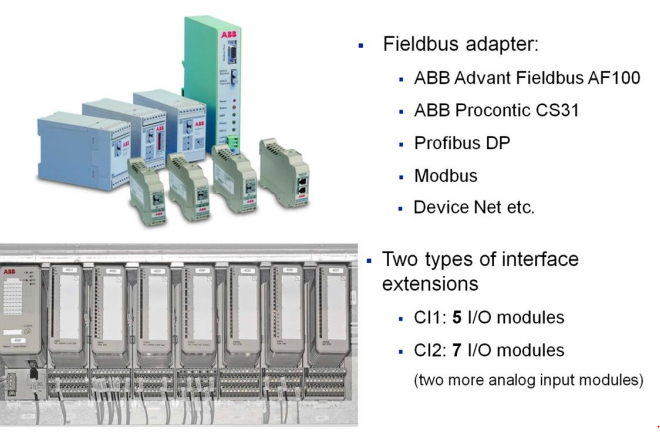
Control Interface:
The ACS 5000 could be controlled through fieldbus or cable wire connections. ABB provides nearly all types of fieldbus solutions. If customers would like to control the ACS 5000 by cable connections, they could choose between two types of interface extensions, CI1 or CI2. S800 analog and digital input and output modules will be used to connect external reference value and control signal cables. They could also be used to monitor external devices such as transformer and motor and they also provide status signals of the converter for the upper control level. The number and types of the modules cannot be changed, and the signal allocation of the I/O modules is fixed.
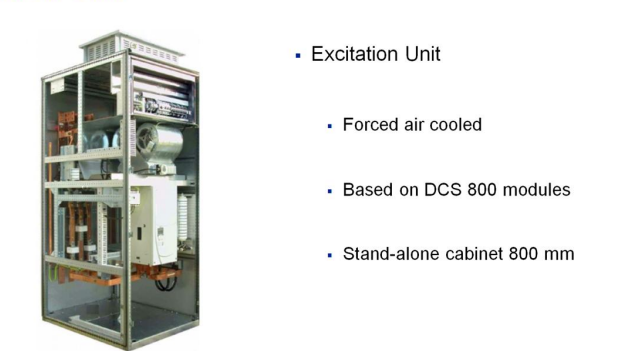
Excitation Unit:
The air-cooled Excitation Unit EXU is delivered as part of the drive when a synchronous motor has to be supplied with excitation current. Excitation units are available for the two excitation methods brushed excitation and brushless excitation.
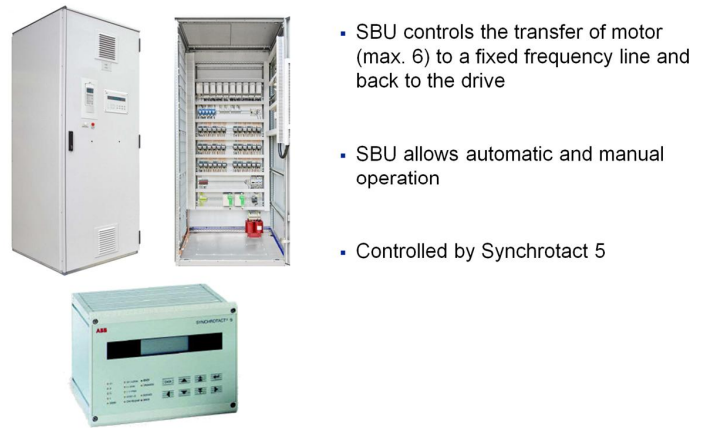
Synchronous Bypass Unit (SBU):
The synchronous bypass control unit is an option for the converter for controlling the transfer of one or more motors to a fixed frequency line and back to the converter with only a very short power interruption. All necessary hardware for the communication and control is included in this unit. Synchro tact 5 is used for the control.
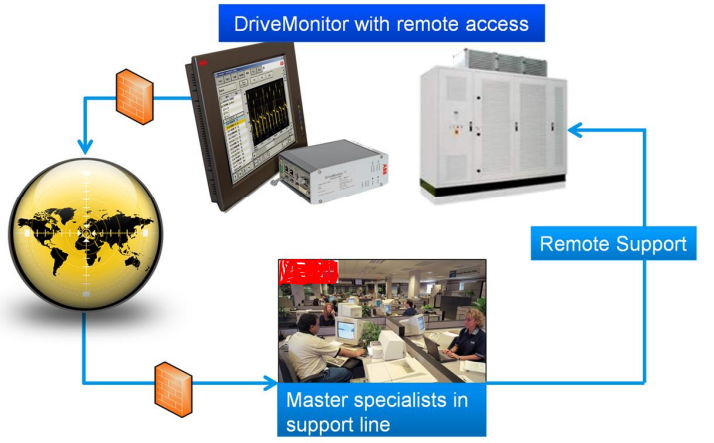
Drive Monitor:
DriveMonitor is an option enabling real-time access to the diagnostic data of medium voltage drives. It allows monitoring of up to 9 drives and provides an Ethernet port to an external PC, to the Intranet of the customer or the Internet. The Internet connection enables ABB service engineers to monitor the performance of the drive without being on site. Then they can give remote support through telephone or email to customers. DriveMonitor acquires data in the event of a drive failure, it can even display the fault and alarm causes and the hints for rectification. This can cut the downtime and troubleshooting time.
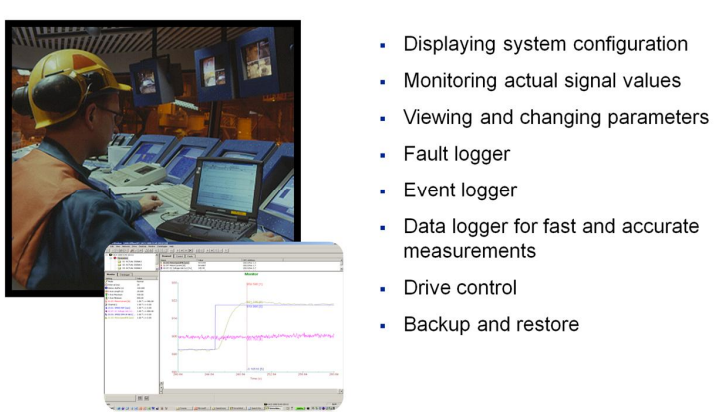
Drive Window:
The PC based Drive Window tool can be used to set parameters, access measurements and diagnostic data and to control the converter in local operation mode as an alternative to the control panel. It offers several functions for commissioning and monitoring of ABB drives.